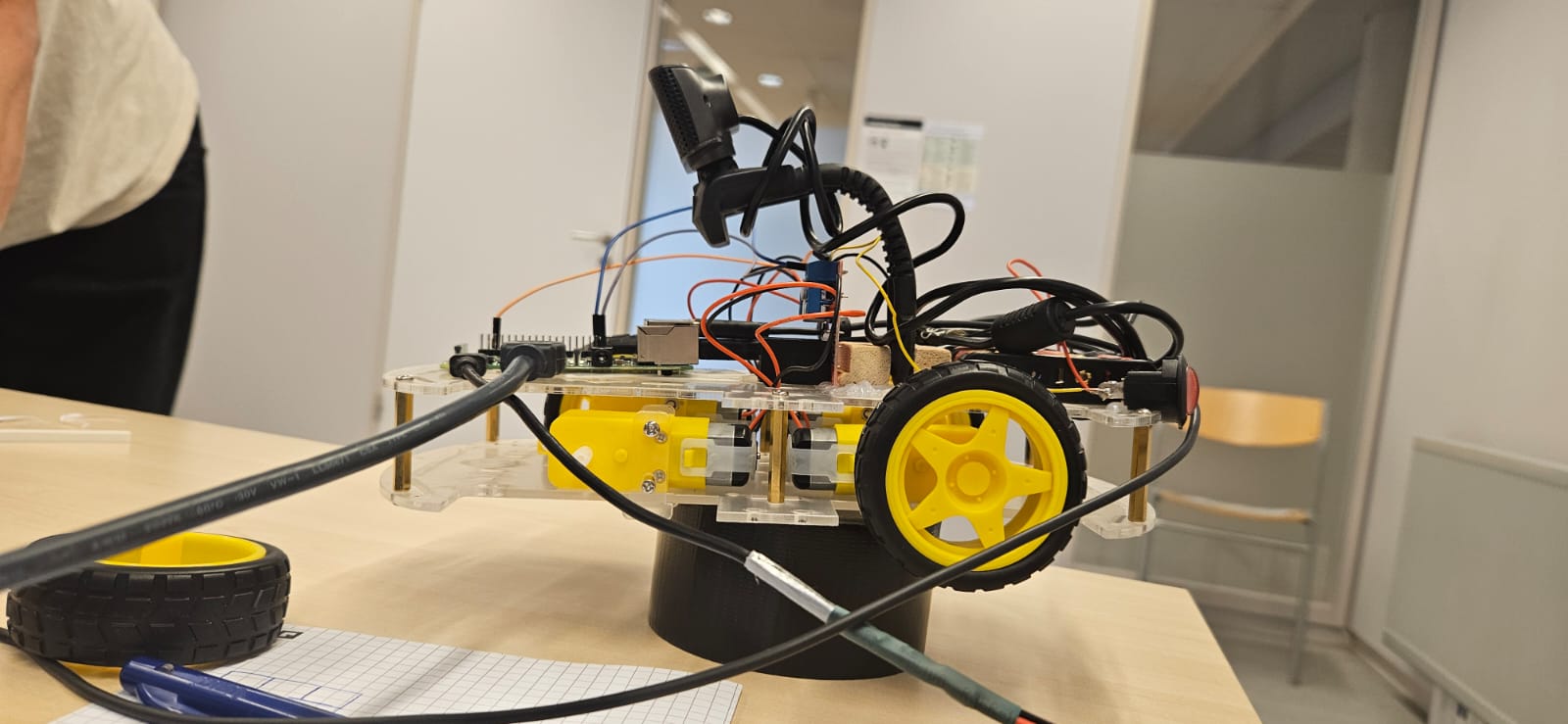
Together with another Creative Technology student I created an AI powered autonomous car that can navigate a line-based mini city. Two self-trained AI models and smart filtering gave the car the ability to drive around the track, wait at intersections until the user gives input and recognize roadsigns.
The first model was fed a labeled dataset of heavily filtered black and white images of the track in front of it, it was then trained to recognize the type of intersection ahead (e.g. straight, curved, cross, t-split, etc…). When a intersection was detected with high confidence it would stop driving and wait for the user to give it instructions to make a turn in a specified direction.


The unfiltered and filtered input images
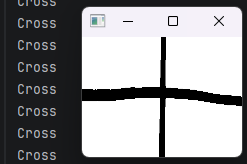
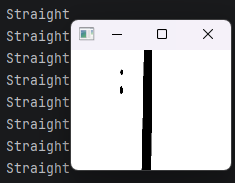
The predicted intersection calculated by the model
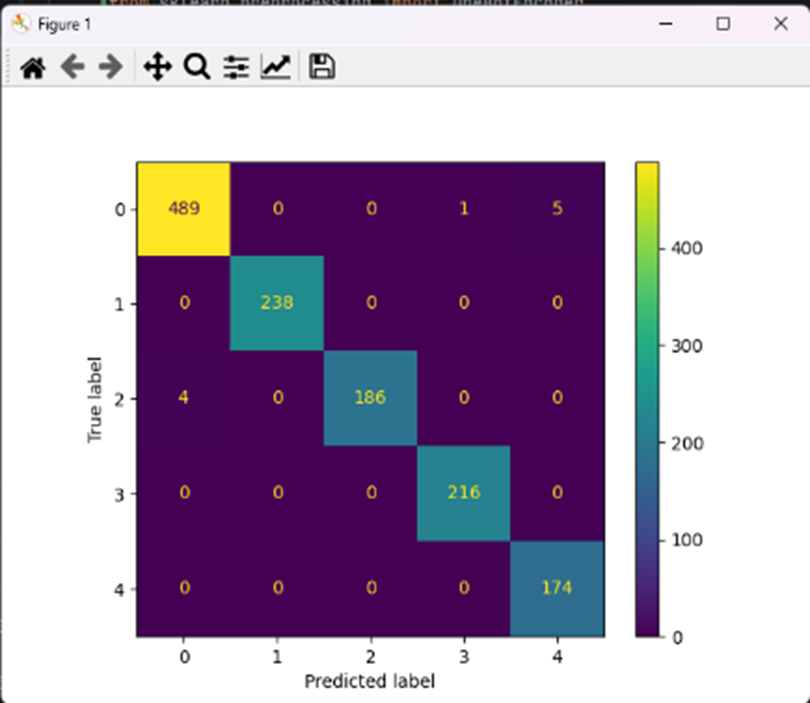
With a model performing well enough (see above) we compile it to a TFLite model and ran it locally on the Raspberry Pi on the car itself.
The same filtered input was also analyzed to find the darkest pixels in the bottom half (signifying where the line is) to make the car steer to keep itself on track.
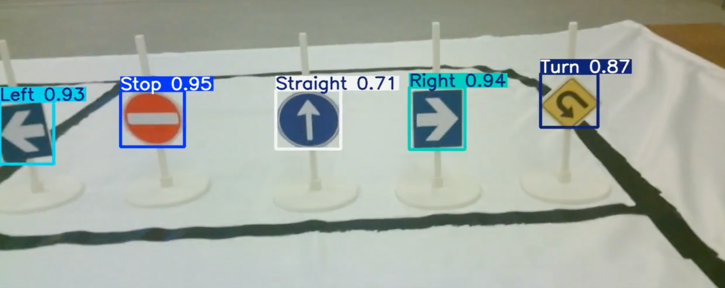
The second model used a self-trained YOLO model to identify possible road signs, these signs then made the car stop, continue, turn around, take a left turn, etc…